客服热线:
客服热线:
















- 供货总量 : 不限
- 价格说明 : 议定
- 包装说明 : 不限
- 物流说明 : 货运及物流
- 交货说明 : 按订单
待喷涂物产生位置偏差的原因主要有以下几个方面:
1)、滑撬与双链的护板存在较为严重的摩擦,导致滑撬与双链之间出现相对运动,6轴喷涂机器人,偏差由此产生。此种问题的出现一方面是双链的护板发生形变下垂,另一方面则是滑撬发生变形再与盖板发生干涉卡死。双链护板阻挡滑撬的前行。
2)、双链本身运转不平稳,存在爬行的情况。这样也会使滑撬与双链之间存在相对运动。
3)、位置跟踪系统出现偏差。机器人本体接收到的位置信号出现误差。机器人接收工件位置信息是依靠双链驱动轮带动编码器齿轮,从而编码器发出脉冲信号传送给机器人进行位置数据的计数。当编码器出现计数偏差时必然导致机器人接收的位置数据的偏差。
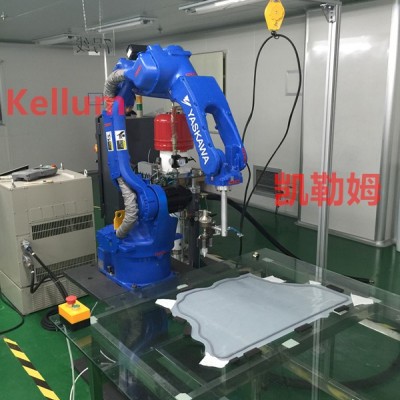
卫浴喷涂
进口喷涂机器人,新疆喷涂机器人,手持示教快速编程技术,编程快速,准确,有效!广泛应用于家具,门板,卫浴喷涂,卫浴陶瓷,塑料,汽车等行业。可为客户进行试喷打样。
常州柯勒玛智能装备有限公司(苏州凯勒姆机器人系统工程有限公司),是意大利CMA机器人的一级代理商,专注于喷涂机器人的应用
革命性的,全自动化的,集成喷涂系统的门窗自动化喷涂设备。
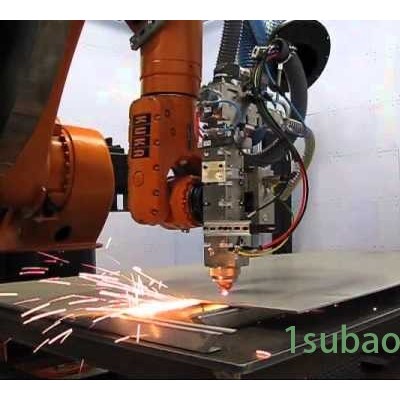
除了膜厚控制对涂装质量影响体现的质量成本外,涂装的主要成本中约有一半被涂料所占据。精que的膜厚控制不仅有助于涂装质量的稳定,还有利于涂料的节约。统计显示,采用同样设备喷涂时,是否精que控制膜厚其所消耗的涂料相差25%以上。目前在国内使用的机器人喷涂主要有日本岩田或三菱机器人,这些设备引进较早,控制精度较差;新的涂装线普遍采用ABB、FANUC、MOTOMAN、DURR等多轴机器人,
新疆喷涂机器人- 常州柯勒玛智能4-卫浴喷涂由常州柯勒玛智能装备有限公司提供。常州柯勒玛智能装备有限公司在工业自动控制系统及装备这一领域倾注了诸多的热忱和热情,常州柯勒玛一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创辉煌。相关业务欢迎垂询,联系人:陈经理。