客服热线:
客服热线:
















- 供货总量 : 不限
- 价格说明 : 议定
- 包装说明 : 不限
- 物流说明 : 货运及物流
- 交货说明 : 按订单
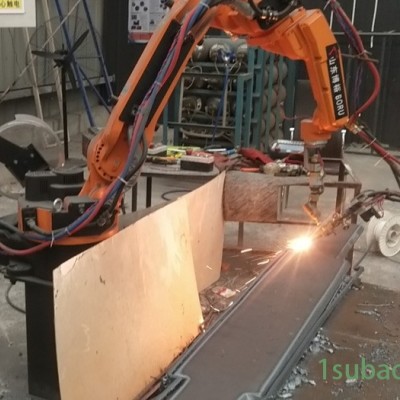
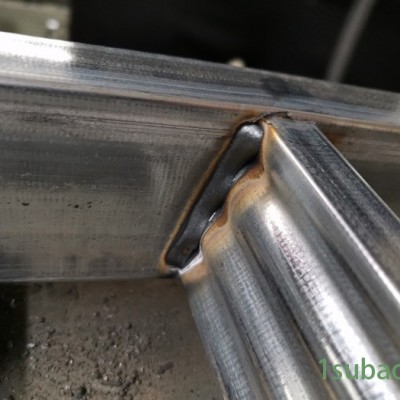
什么是焊接机器人焊缝跟踪寻位? 严格来讲焊接机器人焊缝跟踪寻位系统由两部分组成:焊前通过焊缝寻位功能检测组对间隙是否合适,并达到需要焊接接头点;焊中实时跟踪焊缝及监控产品变形量。 焊缝跟踪:指在焊接位置前方安装光学传感器进行数据采集,或者通过电源的焊接参数采集,然后传输到焊接机器人,进行自适应的各种模糊控制算法校正焊接机器人或专机的轨迹,实现自适应控制,达到实时的焊缝跟踪。
焊缝寻位:指使用一次或多次寻找来定位焊缝的过程,通过在焊接之前移动焊接机器人或编辑机器程序路径来准确定位将要焊接的接头。工业焊接机器人
工业焊接机器人实现周期生产,提升企业效益。焊接机械手作为自动化程度较高的机械设备,更好的帮助企业安排生产,只需要定期进行维护保养,焊接机械手使用寿命可达数十年,企业可以更好的帮助安排生产,提升企业效益。减少成本支出。传统焊接在焊接工作过程中经常会出现焊接缺陷,焊后进行修正工作不仅拖慢生产进程,还会在无形中提高了企业的生产成本,焊接机械手通过对焊缝实现自动填充,可以下放刚刚好的焊接材料,可以节约材料成本,减少企业的成本支出。工业焊接机器人如何实现焊接机器人焊缝跟踪寻位? 实现焊接机器人焊缝跟踪寻位的方法有很多种说法。其中常用的两种为:外设辅助检测和自身检测。 外设辅助检测:激光跟踪、照相成像跟踪。这样的焊缝跟踪寻位控制系统是通过光学测量设备来进行焊缝相关数据采集,焊接机器人进行数据比对进行自适应手臂运动轨迹的调整,达到焊缝的实时跟踪。自身检测:焊丝传感检测、焊接参数实时检测。例如伏能士焊机通过焊丝传感检测工件边缘、高度等数据来达到焊缝跟踪寻位。工业焊接机器人