客服热线:
客服热线:
















- 供货总量 : 不限
- 价格说明 : 议定
- 包装说明 : 不限
- 物流说明 : 货运及物流
- 交货说明 : 按订单
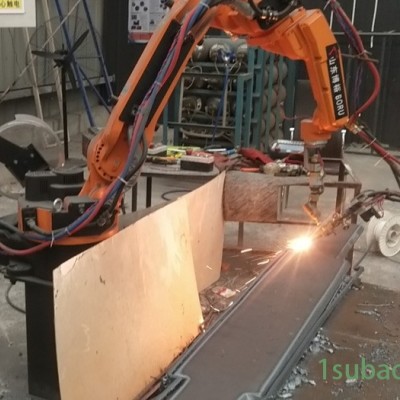
什么是焊接机器人焊缝跟踪寻位? 严格来讲焊接机器人焊缝跟踪寻位系统由两部分组成:焊前通过焊缝寻位功能检测组对间隙是否合适,并达到需要焊接接头点;焊中实时跟踪焊缝及监控产品变形量。 焊缝跟踪:指在焊接位置前方安装光学传感器进行数据采集,或者通过电源的焊接参数采集,然后传输到焊接机器人,进行自适应的各种模糊控制算法校正焊接机器人或专机的轨迹,实现自适应控制,达到实时的焊缝跟踪。
焊缝寻位:指使用一次或多次寻找来定位焊缝的过程,通过在焊接之前移动焊接机器人或编辑机器程序路径来准确定位将要焊接的接头。焊接机器人操作
有些人在使用焊接机器人的时候发现,机器人会突然出现一系列故障问题,这是由很多因素造成的,为了方便用户更好的了解设备,下面我们就为大家简单介绍下,一般设备运行中经常会出现哪些故障问题?生态环境保护不善,假如气体中环境湿度过大及静电作用,同时电焊焊接当场粉尘很大,导致控制箱内积尘、造成误动作。焊接机器人实际操作不善导致的人为因素常见故障,关键有焊接机器人焊机毁坏、装卸工件不善导致变位机转向头灯看不到形变。焊接机器人的接插板接口产生腐蚀空气氧化,松动,导致无法开机或机器设备工作中不平稳。焊接机器人操作
机器人是一种高速的运动设备,在其进行自动运行时不允许人靠近机器人(须设置护栏)。操作人员须接受劳动方面的专门教育,否则不准操作。生命至上!请大家在使用焊接机器人,六轴机器人的时候要多加注意!如果在操作的时候,并没有考虑到这些方面的因素,而是非常盲目的来进行操作处理的话,可能会因为操作的方式不对,对于焊接的效果,对于操作的效果,都会有的影响,这是用户在使用之前须要注意的问题。焊接机器人操作