客服热线:
客服热线:











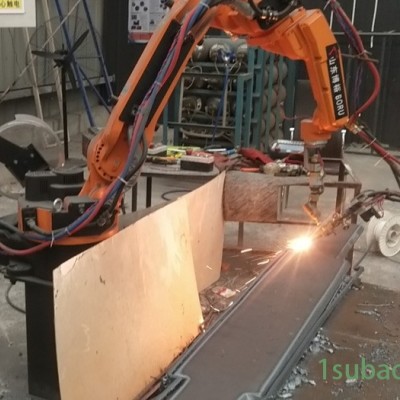






东营焊接机器人厂家-山东博裕机器人-二保焊焊接机器人厂家
- 供货总量 : 不限
- 价格说明 : 议定
- 包装说明 : 不限
- 物流说明 : 货运及物流
- 交货说明 : 按订单
焊接机器人厂家编程和操作错误引起的故障不属于系统软件故障,所以不需要对操作系统进行特殊的处理,只需要对系统所报出的错误信息找到相应的程序段进行修改后就可以正常工作。例如焊接机器人的编程人员在编程过程中没有考虑到手动编程中的运动速度大小问题,自动运行程序时就会由于机器人关节运动速度过快造成惯性力大触发机器人的自动保护程序而造成停机事故。
焊接机器人防护围栏主要用途是在生产的外围设立防护措施,局部或全部建立铝型材防护围栏,以保证人员和设备,部分区域会安装门或留出通道便于货物进出和人员检修。
对于焊接机器人需要有多大的负载能力,很大程度上取决于所用的焊钳形式,通常对于用与变压器分离的焊钳,30-45kg负载的焊接机器人足够了。但是这种焊钳一方面由于二次电缆线长,电能损耗大,也不利于机器人将焊钳伸入工件内部焊接;另一方面电缆线随焊接机器人运动而不停摆动,电缆的损坏较快,因此目前已经逐步替换成一体式焊钳。
所谓为了避免环境因素对焊接机器人造成不良影响,延长其使用寿命,尽量将焊接机器人安装在防水干燥、灰尘少的地方。并且要求控制柜和焊机尽量也与地面保持一段距离。焊接机器人厂家
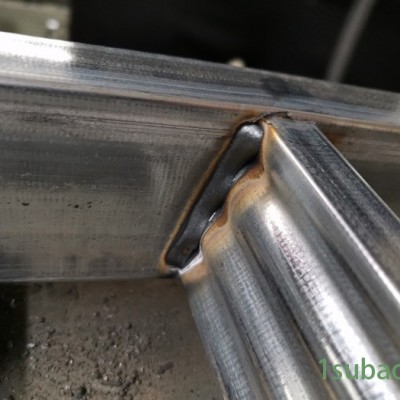
减少焊接机器人焊接应力与变形的工艺措施主要有: 1、预留收缩变形量 根据理论计算和实践经验,在焊接机器人焊件备料及加工时预先考虑收缩余量,以便焊后工件达到所要求的形状、尺寸。 2、刚性固定法 焊接机器人焊接时将焊件加以刚性固定,焊后待焊件冷却到室温后再去掉刚性固定,可防止角变形和波浪变形。此方法会加大焊接应力,只适用于塑性较好的低碳钢结构。 3、反变形法根据理论计算和实践经验,预先估计焊接机器人结构焊接变形的方向和大小,然后在焊接装配时给予一个方向相反、大小相等的预置变形,以抵消焊后产生的变形。焊接机器人厂家